| Back to KBS | |||||
|
IntroductionThe Intelligent Driving Agents (IDA) project is the project that I have been working on for my Master's thesis. The goal of the project is to design an intelligent agent that can control a vehicle and adjust to its environment. The idea is to use human driving behavior as a basis and design a number of simple behavior rules for the agent. Using adjustable parameters such as aggresiveness, desired speed, acceleration rate, gap acceptance etc., these agents can drive just like humans do.By combining Rodney Brooks' subsumption architecture with a blackboard architecture the following behavior-based agent was constructed: 
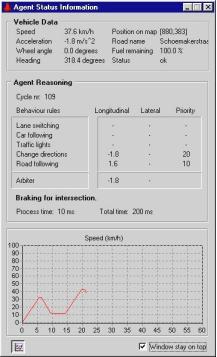
ReasoningThe agent's reasoning process is as follows:
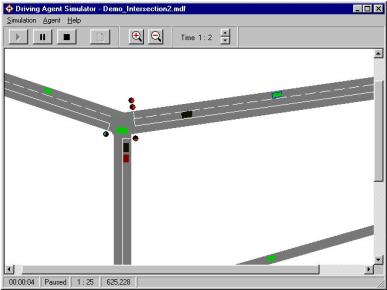
ImplementationThe agent model above was tested and implemented in a prototype simulation environment. The environment consists of multi-lane roads, intersections, traffic lights and multiple vehicles. On a Intel Pentium III, 450Mhz with 64 MB of RAM, we were able to run the simulator with up to 40 agents working in parallel in real-time. Adding more agents was possible but resulted in a slow- running simulation.
Future workAt the moment, we are busy improving the simulator program. First, we are changing the current simulator into a distributed program to connect agents running on different computers over the network. This way we can run much more agents and create realisitic traffic jams. Second, we plan to expand the simulation environment with more objects, such as traffic signs, crosswalks, buildings, and parked vehicles. In addition, we will add new behavior rules to the existing agents to deal with these new objects. |
|
||||
| Page Top |